وقتی حشرات علم رباتیک را آموزش میدهند!

به گزارش راه پایدار:حشرات در سالهای اخیر به یک منبع الهام قوی برای ساخت رباتهای کوچک تبدیل شدهاند. بسیاری از دانشمندان سعی دارند با تقلید از تواناییهای این موجودات کوچک، رباتهایی بسازند که میتوانند در فضاهای محدود و محیطهای خشن پرواز کنند تا کارهایی را انجام دهند که انسانها قادر به انجام دادن آنها در چنین محیطهایی نیستند.
به گزارش ایسنا، هر روز از فناوریهای جدید در حوزههای گوناگونی مانند مبارزه با بیماریهای نادر، استفاده از انرژی کمتر و پاکتر یا استفاده از فرآیندهای تولید صنعتی ایمنتر و کارآمدتر، برای بهبود زندگی استفاده میشود. بسیاری از این فناوریها، استانداردها و سیستمهای ارزیابی «کمیسیون بینالمللی الکتروتکنیک»(IEC) را برای کمک کردن به عملکرد ایمن و کارآمد به کار میگیرند.
حوزههای جالب توسعه اخیرا تا حدود زیادی از دنیای بیولوژیکی و حیوانی سرچشمه گرفتهاند. حوزههای جدیدی نیز برای پژوهش و توسعه در حوزه بیودیجیتال در حال ظهور هستند که میتوانند رویکرد ما را به دنیای طبیعی تغییر دهند. یکی از این حوزههای جدید پژوهش و توسعه، رباتیک الهامگرفته از دنیای حیوانات است. مارها، ملخها، سوسکها، مگسها یا حتی اختاپوسها به دانشمندان در ابداع کردن نسل بعدی رباتها کمک میکنند.
رباتهای کوچک طراحیشده براساس رفتار حشرات، یک موضوع داغ پژوهشی هستند زیرا کارکرد و تنظیم کردن آنها نسبت به رباتهای انساننمای بزرگ، آسانتر است. رشته جدیدی از علم رباتیک به جستجوی دنیای حشرات میپردازد تا از آنها الهام بگیرد. همانطور که حسگرها و قطعات کوچک به واقعیت تبدیل میشوند و به ویژه برای ساخت ساعت و تلفنهای همراه هوشمند به کار میروند، شکلها و اندازههای جدیدی از رباتها در آزمایشگاههای سراسر جهان ظهور میکنند. آنها کاربردهای بالقوه بسیار گستردهای را مانند امدادرسانی هنگام وقوع بلایای طبیعی تا گردهافشانی دارند.
رباتهای پرنده در سالهای اخیر برای کاربردهای گوناگون به طور فزایندهای محبوب شدهاند. یکی از جذابترین زمینههای توسعه در فناوری پهپادها، ساخت رباتهای پرنده کوچک است که ظاهر و حرکات حشرات و پرندگان را تقلید میکنند. این رباتها پتانسیل متحول کردن طیف گستردهای از صنایع را از جستجو و نجات گرفته تا کشاورزی دارند.
حشرات پرنده در واقع ریزماشینهای هوشمندی هستند که میتوانند به صورت عالی در محیطهای غیرقابل پیشبینی مانور دهند. درک کردن این سیستمها، دانش لازم را در مورد کنترل پرواز، مجموعههای حسگر و آیرودینامیک ناپایدار ارتقا میدهد که برای مهندسان مسئول توسعه رباتهای پرنده هوشمند یا میکرووسایل نقلیه هوایی بسیار مهم است. اطلاعاتی که هنگام ساخت سیستمهای الهامگرفته از حشرات به دست میآیند، میتوانند برای حوزههای فیزیولوژی عصبی، اخلاقشناسی و جانورشناسی سودمند باشند.
حشرات پرنده در واقع ریزماشینهای هوشمندی هستند که میتوانند به صورت عالی در محیطهای غیرقابل پیشبینی مانور دهند. در دو دهه گذشته، شاهد به کارگیری اطلاعات حاصل از این پژوهشها برای طراحی کردن حسگرهای جدید الهامگرفته از حشرات برای انواع کاربردهای مهندسی بودهایم. حشرات پرنده به خوبی بر روشهای سنجش حرکت بصری تسلط دارند. آنها از مدارهای پردازش حرکت ویژه استفاده میکنند. دانشمندان با استفاده کردن از این اطلاعات در هدایت بصری حشرات، حسگرهای حرکتی بصری و سیستم خودکار هدایت را برای رباتهای پرنده توسعه دادهاند. سیستمهای کنترل بصری مبتنی بر جریان نوری، روی تعداد بسیاری از رباتهای خودران پیادهسازی شدهاند.
مورچهها، زنبورها و سایر حشرات اجتماعی، رفتارهای جمعی پیچیده و هماهنگی را در گروههای بزرگ از خود نشان میدهند. این ویژگی، الهامبخش توسعه رباتهای کوچک است که با هم کار میکنند تا وظایف محولشده را به طور موثر انجام دهند. این رباتها، کاربردهایی را در زمینههایی مانند ماموریتهای جستجو و نجات و نظارت بر محیط زیست دارند.
طبیعت در طول تاریخ پژوهش رباتیک، ایدهها و الهامات بسیاری را به مهندسان رباتیک ارائه کرده است. برای مثال، رباتهای کوچک حشرهمانند معمولا از رفتارهای حشرات برای دوری کردن از موانع هنگام حرکت کردن استفاده میکنند. این نوع رباتهای الهامگرفته از حشرات عموما برای آزمایش کردن فرضیههای حلنشده در علوم زیستی ساخته میشوند. پژوهشهای رباتیک که از طریق همکاری نزدیک بین زیستشناسان و متخصصان رباتیک انجام میشوند، نه تنها به پرسشهای چالشبرانگیز در طبیعت پاسخ میدهند، بلکه به توسعه فناوریهای جدید برای کاربردهای رباتیک کمک میکنند.
ویژگیهای الهامبخش حشرات
حشرات به دلیل خدمات مهمی مانند گردهافشانی و تجزیه شناخته شدهاند و یک بخش حیاتی از زنجیره غذایی جهانی هستند اما چه ویژگیهایی دارند که سبب شده از آنها در ساخت فناوریهای انسانی الهام گرفته شود؟
۱. چشمهای مرکب حشرات که از عدسیهای ریز متعددی تشکیل شدهاند، الهامبخش توسعه سیستمهای تصویربرداری پیشرفته هستند. دانشمندان و مهندسان از ساختار چشم حشرات الهام گرفتهاند تا دوربینها و دستگاههای تصویربرداری کوچک را با زاویه دید گسترده ایجاد کنند که میدان دید وسیع و درک عمق را بهبود میبخشند.
۲. چسبندگی پای حشرات به توسعه چسبهای نوآورانه و فناوریهای کوهنوردی کمک کرده است. دانشمندان با مطالعه کردن ساختارها و مکانیسمهای میکروسکوپی پای حشرات، چسبهایی ساختهاند که میتوانند به سطوح گوناگون بچسبند و امکان توسعه رباتهای کوهنورد و مواد چسبنده پیشرفته را فراهم کنند.
۳. ساختار ژنتیکی ساده و طول عمر کوتاه حشراتی مانند مگس میوه موجب شده است که آنها معمولا به عنوان موجودات نمونه در پژوهشهای پزشکی استفاده شوند. این ویژگیها، آنها را به یک مدل ایدهآل برای مطالعه کردن فرآیندهای بیولوژیکی و مکانیسم بیماریهای گوناگون تبدیل میکند. پژوهشهای انجامشده روی این حشرات، اطلاعات ارزشمندی را برای درک کردن بیولوژی انسان و توسعه دادن مداخلات پزشکی ارائه کردهاند.

۴. حشرات منبعی از ترکیبات فعال زیستی هستند که میتوان از آنها در پژوهشهای دارویی استفاده کرد. به عنوان مثال، پپتیدهای ضد میکروبی که در سیستم ایمنی حشرات یافت میشوند، الهامبخش توسعه آنتیبیوتیکهای جدید هستند. سم حشرات نیز به دلیل پتانسیل آنها در تسکین درد، درمان سرطان و اختلالات عصبی مورد بررسی قرار گرفته است.
۵. حشرات، سازگاری و ویژگیهای منحصربهفردی دارند که الهامبخش توسعه تجهیزات و فناوریهای پزشکی است. به عنوان مثال، ساختارهای میکروسکوپی روی بالهای پروانه که آب و آلودگی را دفع میکنند، بر طراحی کردن سطوح خودتمیزشونده برای تجهیزات و ایمپلنتهای پزشکی تأثیر گذاشتهاند.
۶. ساختارهای ریز سوزنی در برخی از قسمتهای دهان بعضی حشرات مانند پشهها، به دلیل پتانسیل آنها برای کاربردهای بدون درد و کمتر تهاجمی، توجه زیادی را برای توسعه تجهیزات پزشکی و دارورسانی به خود جلب کردهاند.
حشرات الهامبخش رباتها
۱. زنبور. زنبورهای رباتیک، رباتهای پرنده کوچکی هستند که با تقلید از رفتار زنبورها طراحی شدهاند و هدف از ساخت آنها کمک کردن به گرده افشانی است. اندازه این رباتها فقط چند سانتیمتر است و از یک موتور کوچک نیرو میگیرند که بالهای آنها را با سرعت بالایی تکان میدهد. همچنین، زنبورهای رباتیک به حسگرهایی مجهز هستند که به آنها امکان میدهد تا در محیط اطراف خود حرکت کنند و از موانع دور شوند.




۲. سنجاقک. سنجاقکهای رباتیک، رباتهای پرنده کوچکی هستند که با الگوبرداری از سنجاقک ساخته شدهاند و میتوانند در همه جهتها پرواز کنند. این رباتها از چهار بال نیرو میگیرند که میتوانند به طور مستقل به حرکت درآیند و امکان کنترل دقیق حرکات ربات را فراهم کنند. همچنین، سنجاقکهای رباتیک دارای یک دوربین داخلی هستند که امکان کنترل و نظارت از راه دور را فراهم میکند.

۳. مگس میوه. مگسهای میوه رباتیک، رباتهای کوچک پرنده هستند که در ساخت آنها از مگس میوه الگوبرداری شده است و قابلیت لازم را برای معلق شدن و پرواز کردن در فضاهای تنگ دارند. این رباتها به دوربین کوچکی مجهز هستند که به آنها امکان میدهد تا در محیط خود حرکت کنند و از موانع دور شوند. مگسهای میوه رباتیک، فوقالعاده سبکوزن هستند.
۴. سوسک. سوسکها به ویژه سوسکهای صحرای نامیب، الهامبخش توسعه روشهای نوآورانه در جمعآوری کردن آب هستند. این سوسکها ساختارهای ویژهای دارند که به آنها امکان میدهد تا آب را از مه جمعآوری کنند. دانشمندان از این ساختار بدن سوسکها برای ساخت رباتهایی استفاده کردهاند که میتوانند آب را از هوا برداشت کنند و یک راه حل پایدار را برای جبران کردن کمبود آب در مناطق خشک ارائه دهند.
۵. مگس «لوسیلیا سریکاتا»(Lucilia sericata). لارو گونه خاصی از مگسها موسوم به لوسیلیا سریکاتا قرنهاست که در پزشکی برای کمک کردن به بهبود زخم مورد استفاده قرار میگیرند. لارو این مگسها، آنزیمهایی را ترشح میکنند که برداشته شدن بافت مرده و التیام زخم را تقویت میکنند. علاوه بر این، پژوهشگران در حال مطالعه کردن قابلیتهای حشرات در بازسازی خود، از جمله توانایی آنها در پرورش مجدد قسمتهای از دسترفته بدن هستند تا اطلاعاتی را در مورد بازسازی بافت بدن انسان به دست بیاورند.
حشرات در خدمت رباتیک
پژوهشهای بسیاری اخیرا تلاش کردهاند تا از تواناییهای گوناگون حشرات در علم رباتیک استفاده کنند و این تواناییها را در رباتهای کوچک به کار ببرند. در ادامه این گزارش به بررسی برخی از جدیدترین پژوهشهایی میپردازیم که در آنها از حشرات الهام گرفته شده است.
پژوهش منتشرشده در ژانویه سال ۲۰۲۴، از طراحی و ساخت دو ربات کوچک در «دانشگاه ایالتی واشنگتن»(WSU) خبر داد که به گفته این گروه پژوهشی، کوچکترین، سبکترین و سریعترین رباتهای کاربردی ساختهشده تا به امروز هستند.
شاید روزی بتوان از این رباتهای کوچک برای کارهایی مانند گردهافشانی مصنوعی، عملیات جستجو و نجات، نظارت بر محیط زیست، ساخت در مقیاس میکرو یا جراحی رباتیک استفاده کرد. این مینیرباتها، هشت میلیگرم وزن دارند و میتوانند با سرعت حدود ۶ میلیمتر در ثانیه حرکت کنند.

«کانر تریگستاد»(Conor Trygstad)، دانشجوی مقطع دکتری مهندسی مکانیک و مواد دانشگاه ایالتی واشنگتن و پژوهشگر ارشد این پروژه گفت: اگرچه این رباتها هنوز از بستگان بیولوژیکی خود عقب هستند اما در مقایسه با سایر رباتهای کوچک در مقیاس مشابه، سریع عمل میکنند. یک مورچه معمولا تا پنج میلیگرم وزن دارد و میتواند با سرعت تقریبا یک متر در ثانیه حرکت کند.
کلید رباتهای کوچک، محرکهای کوچک آنهاست که به حرکت رباتها کمک میکنند. تریگستاد از یک روش جدید برای کوچک کردن محرک تا کمتر از یک میلیگرم استفاده کرد که آن را به کوچکترین محرک ساختهشده تا به امروز تبدیل میکند. «نستور پرز آرانسیبیا»(Néstor Pérez-Arancibia) دانشیار مهندسی مکانیک و مواد دانشگاه ایالتی واشنگتن و سرپرست این پژوهش گفت: محرکها کوچکترین و سریعترین محرکهایی هستند که تاکنون برای میکرورباتها ساخته شدهاند.
محرک از مادهای به نام «آلیاژ حافظهدار» استفاده میکند که میتواند هنگام گرم شدن، شکل آن را تغییر دهد. از آن جهت به این آلیاژ، حافظهدار میگویند که شکل اولیه را به خاطر میآورد و به آن باز میگردد. برخلاف موتورهای معمولی که یک ربات را به حرکت در میآورند، این آلیاژها هیچ قسمت متحرک یا اجزای چرخان ندارند. تریگستاد گفت: آنها از نظر مکانیکی بسیار سالم هستند. توسعه محرک بسیار سبکوزن، روزنههای جدیدی را در حوزه میکرورباتیک باز میکند.
پژوهشگران «دانشگاه هنگکنگ»(HKU) در اکتبر سال ۲۰۲۳ از ساخت یک سیستم تغییر رنگ با الهام از بالهای پروانه خبر دادند که میتواند دید مرکب را برای رباتها فراهم کند. آنها مواد جدیدی را ابداع کردند تا این ایده را به واقعیت تبدیل کنند. آنها یک ماده مشابه لاستیک با قابلیت تغییر رنگ ابداع کردند که «MoCA» نام دارد.
بیشتر بخوانید:
رباتها به زودی مثل حشرات خواهند دید
این ماده منحصربهفرد الهامگرفته از بالهای پروانه، از پیکسلهای متعددی تشکیل شده است که هر کدام را میتوان به طور جداگانه تنظیم کرد تا الگوی رنگی مورد نظر به دست بیاید. پژوهشگران گفتند: ما باور داریم که پیکسلسازی را میتوان برای طراحی کردن رابطهای بیشتر و سیستمهای نوری متعدد مانند چشمهای مرکب مصنوعی یا لنزهای بلوری برای کاربردهای بیومیمتیک و رباتیک مورد استفاده قرار داد.
بالهای پروانه، ساختارهای منحصربهفردی را برای تنظیم کردن نور دارند که «فرورفتگیهای ریز دو رنگ» نامیده میشوند. عملکرد این فرورفتگیهای کوچک مانند بلورهای فوتونی است که میتوانند نور را مسدود، کنترل و دستکاری کنند. هنگامی که نور روی این فرورفتگیها میافتد، در زوایای خاصی شکسته میشود و در نتیجه، الگوهای دو رنگی را روی بالهای پروانه ایجاد میکند. سیستم MoCA نیز به همین شکل دارای سوراخها یا بلورهای فوتونی است تا رنگهای گوناگون را تولید کند. این سیستم، دو لایه دارد. لایه مسطح بالا متشکل از یک نوار محرک الاستومر بلور فوتونی و لایه مقعر پایین دارای سوراخهای گرد است که با فاصله منظم از یکدیگر قرار گرفتهاند.
چشمهای حشرات دارای عدسیهای متعددی هستند که به آنها امکان میدهد تا میدان دید وسیعی داشته باشند؛ یعنی میتوانند طول موجهایی را از نور فرابنفش تا نور قرمز جذب کنند.سیستم MoCA به غیر از توانایی تغییر رنگ، دارای پتانسیل دستیابی به دید مرکب است که در حشرات وجود دارد. حشرات برخلاف انسان، تصاویر را به صورت پیکسلی میبینند.
اگرچه چشم انسان میتواند تصاویر رنگارنگ را با شفافیت و وضوح بالا تولید کند اما قادر نیست به طور همزمان روی چندین جسم متمرکز شود یا اشعه فرابنفش را ببیند. در مقابل، چشمهای حشرات دارای عدسیهای متعددی هستند که به آنها امکان میدهد تا میدان دید وسیعی داشته باشند؛ یعنی میتوانند طول موجهایی را از نور فرابنفش تا نور قرمز جذب کنند. همچنین چشمهای مرکب، حشرات را قادر میسازند تا روی اجسام متعدد در محیط اطراف خود تمرکز داشته باشند.
رباتهای ساختهشده توسط مهندسان «دانشگاه کالیفرنیا سندیگو»(UC San Diego) که در اکتبر سال ۲۰۲۳ رونمایی شدند، به یک پیشرفت بزرگ در درک کردن چگونگی تکامل پرواز حشرات کمک کردند. این پژوهش نتیجه یک همکاری شش ساله بین متخصصان رباتیک دانشگاه کالیفرنیا سندیگو و بیوفیزیکدانان «مؤسسه فناوری جورجیا»(Georgia Tech) بود.
یافتههای این پژوهش بر چگونگی تکامل یافتن دو حالت متفاوت از پرواز در حشرات متمرکز هستند.
۱. بیشتر حشرات از مغز خود برای فعال کردن عضلات پروازی در هر بار تکان دادن بال استفاده میکنند. این کار مانند عملکرد انسان در گام برداشتن است زیرا هر گامی که برمیداریم، عضلات پای خود را فعال میکنیم. به این حالت حشرات، پرواز همزمان گفته میشود.
۲. برخی از حشرات مانند پشهها میتوانند بالهای خود را بدون این که سیستم عصبی آنها به هر ضربه بال فرمان دهد، تکان دهند. در عوض، عضلات این حشرات به طور خودکار با کشیده شدن فعال میشوند. به این حالت، پرواز ناهمزمان گفته میشود. پرواز ناهمزمان در چهار گروه اصلی حشرات رایج است و به آنها امکان میدهد تا بالهای خود را با سرعت زیاد تکان دهند. به عنوان مثال، به برخی از پشهها امکان میدهد تا بیش از ۸۰۰ بار در ثانیه بالهای خود را تکان دهند.
دانشمندان سالها چهار گروه حشرات شامل زنبورها، مگسها، سوسکها و «نیمبالان»(hemiptera) را به عنوان حشراتی در نظر میگرفتند که پرواز ناهمزمان در آنها تکامل یافته است اما تحلیل جدیدی که توسط گروه مؤسسه فناوری جورجیا انجام شد، نتیجه گرفت که پرواز ناهمزمان در واقع در اجداد مشترک آنها تکامل یافته است. سپس، برخی از گونههای حشرات به پرواز همزمان روی آوردند و برخی دیگر ناهمزمان باقی ماندند.
این یافته تکاملی جدید، دو پرسش اساسی را مطرح کرد. اول اینکه آیا عضلات شبپره نیز نشانههایی را از ناهمزمانی پیشین خود نشان میدهند و دوم این که چگونه یک حشره میتواند ویژگیهای همزمان و ناهمزمان را در عضلات خود حفظ کند و همچنان قادر به پرواز کردن باشد.
نمونه ایدهآل برای پاسخ دادن به این پرسشها پیرامون تکامل همزمان و ناهمزمان، «بازشاپرکان» هستند زیرا شبپرهها از حالت پرواز همزمان استفاده میکنند اما سابقه تکاملی میگوید که آنها اجدادی با ویژگی پرواز ناهمزمان دارند. پژوهشگران مؤسسه فناوری جورجیا ابتدا به دنبال نشانههای ناهمزمانی در عضله بازشاپرکان بودند. آنها با بررسی کردن ویژگیهای مکانیکی عضله دریافتند که بازشاپرکان هنوز ویژگیهای فیزیکی پرواز ناهمزمان را حفظ کردهاند؛ حتی اگر از آنها استفاده نشود.

چگونه یک حشره میتواند حالت پرواز همزمان و ناهمزمان را داشته باشد و همچنان پرواز کند؟ برای پاسخ دادن به این پرسش، پژوهشگران تصمیم گرفتند رباتهایی را با الهام از حشرات بسازند و آزمایشهایی را انجام دهند که هرگز نمیتوان روی حشرات انجام داد. آنها رباتها را به موتورهایی مجهز کردند که میتوانند ترکیبی از حالت پرواز همزمان و ناهمزمان را تقلید کنند. سپس، آنها آزمایش کردند که چه تغییراتی ممکن است در طول میلیونها سال تکامل پرواز رخ داده باشد.
در این پژوهش، حشرات در واقع به رباتهایی کمک کردند که با الهام از خود آنها ساخته شدند. «نیک گراویش»(Nick Gravish) استاد مهندسی مکانیک و هوافضا در دانشکده مهندسی دانشگاه کالیفرنیا سندیگو و پژوهشگر ارشد این پروژه گفت: این پژوهش، پتانسیل روبوفیزیک را برجسته میکند که تمرین به کار بردن رباتها برای مطالعه کردن فیزیک سیستمهای زنده است.
وی افزود: ما توانستیم درک درستی را در مورد چگونگی انتقال بین پرواز ناهمزمان و همزمان داشته باشیم. ما از طریق ساختن یک ربات با الهام از حشرات، به پاسخ دادن به یک پرسش تکاملی در زیستشناسی کمک کردیم.
حشرات اجتماعی هستند
حشرات، حیوانات اجتماعی هستند. یک گروه از مورچهها میتوانند موادی را حمل کنند که چندین برابر وزن آنها هستند. زنبورهای عسل در روزهای گرم تابستان، مقابل کندوی خود صف میکشند و بال زدن خود را هماهنگ میکنند تا جریان هوا را درون و بیرون کندو به وجود بیاورند و دمای درون را خنک کنند.
مطالعه کردن این رفتارهای جمعی میتواند رباتهای آینده را قادر سازد تا وظایف حشرات مانند گردهافشانی انجام دهند. متخصصان میکررباتیک در طول بیست سال گذشته، چگونگی ساخت رباتهایی را بررسی کردهاند که در مقیاس حشرات هستند.
مطالعه کردن رفتارهای جمعی حشرات میتواند رباتهای آینده را قادر سازد تا وظایفی مانند گردهافشانی را انجام دهند.دانشمندان در سالهای اخیر، رباتهای کوچکی را با عملکردهای حشرات ساختهاند که در رباتهای مقیاس بزرگتر وجود ندارند. از جمله این رباتها میتوان رباتهای یک سانتیمتری را نام برد که هنگام پرش، به ارتفاع بیش از ۴۰ برابر اندازه خود میرسند. یک نوع دیگر از این رباتها، رباتهای کوچک چهارپا هستند که میتوانند روی سطح آب حرکت کنند و از دیوارها و سقفها بالا بروند. گروه سوم، رباتهای کوچک پرنده هستند که میتوانند روی برگها بنشینند، نور را در طول پرواز بتابانند یا حتی در اواسط پرواز بدن خود را بچرخانند.
اگرچه این رباتها فناوری چشمگیری هستند اما عمدتا به دلیل دشواری ساخت و محدودیت در استحکام، به صورت انفرادی کار میکنند. به طور سنتی، بیشتر میکرورباتها طراحی خستهکننده و مونتاژ دستی را شامل میشوند که کارکرد آنها را محدود میکند.
پژوهشگران دانشگاه «امآیتی»(MIT) با هدف امکانپذیر کردن پرواز گروهی رباتهای حشره مانند، روشهای جدیدی را برای طراحی و ساخت ابداع کردهاند که زمان و منابع مورد نیاز را برای ساخت این رباتهای کوچک کاهش میدهد.
به طور سنتی، میکرورباتها با استفاده از نرمافزار «طراحی به کمک رایانه» یا «کَد»(CAD) طراحی میشوند که عموما برای طراحی و ساخت قطعات ربات در مقیاس بزرگتر است.
در ساخت مقیاس میکرو، اجزای سهبعدی سازنده میکرورباتها از لایههای مواد دوبعدی تشکیل شدهاند. یک ساختار ساده شامل لایههایی از مواد است و همه الگوهای طراحی این مواد به هم مرتبط هستند. یک طراح هنگام استفاده کردن از نرمافزار تجاری باید به صورت دستی الگوهای طراحی را برای هر لایه ایجاد کند. اگر یک پارامتر طراحی نیازمند بهروزرسانی باشد، پژوهشگر باید به صورت دستی همه طرحها را اصلاح کند که میتواند زمانبر باشد و به بروز خطاهای طراحی منجر شود.
گروه دانشگاه امآیتی، یک روش طراحی پارامتری را توسعه دادند که در آن یک پژوهشگر فقط باید چند پارامتر مهم را مشخص کند تا نرمافزار سفارشیسازیشده بتواند کار تولید را انجام دهد. این روش طراحی برای ساخت میکرورباتها طراحی شده است و توانایی لازم را برای تمرکز کردن روی طرحهای پیچیدهتر و کاهش زمان طراحی از چند ساعت به چند ثانیه فراهم میکند.
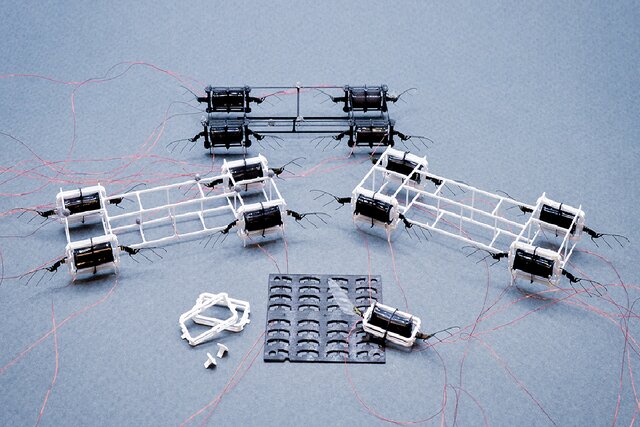
این روش طراحی همراه با چاپ سهبعدی برای خودکارسازی روند ساخت استفاده شد. بدنه رباتهای توسعهیافته توسط این گروه پژوهشی در گذشته از ساختارهای دوبعدی فیبر کربن ساخته میشد. این ساختارها به مونتاژ دستی زیر میکروسکوپ نیاز داشتند که مهارت بالا و آموزش گسترده را میطلبید. در این پژوهش، اجزای لازم برای ساخت ۶۴ ماژول ربات تولید شدند.
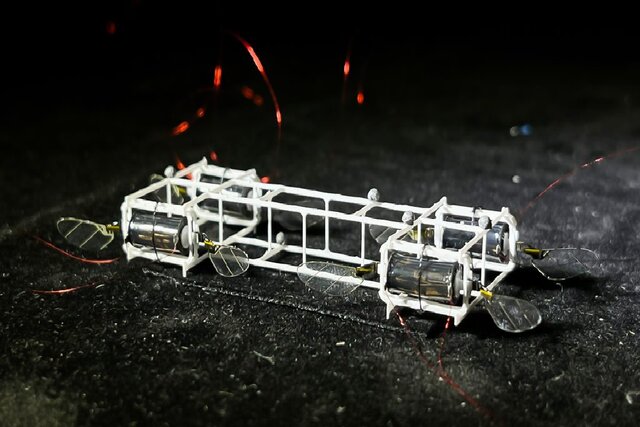
حمل کردن گروهی محموله به ویژه برای رباتهای پرنده بسیار مهم است. اگرچه یک ربات به تنهایی دارای محموله بسیار محدودی است اما گروهی از رباتها به همراه یکدیگر میتوانند اجسام سنگینتر و بزرگتر را حمل کنند.رباتهایی که در این پژوهش ساخته شدند، شبیه به زنبورهای عسل هستند و بالهای کوچک خود را ۴۰۰ بار در ثانیه تکان میدهند تا خود را از زمین بلند کنند. در مقایسه با رباتهای پیشین همین گروه پژوهشی، این رباتها با قطعات چاپ سهبعدی باثباتتری ساخته شدند و توانایی پرواز کردن را بدون تنظیم سختافزاری و نرمافزاری از خود نشان دادند.
حمل کردن گروهی محموله به ویژه برای رباتهای پرنده بسیار مهم است. اگرچه یک ربات به تنهایی دارای محموله بسیار محدودی است اما گروهی از رباتها به همراه یکدیگر میتوانند اجسام سنگینتر و بزرگتر را حمل کنند. پرواز هماهنگ دو ربات که پشت سر هم پرواز میکنند، در این پژوهش نشان داده شد و جالبتر اینکه آنها توانستند در حال بلند کردن یک جسم با هم پرواز کنند.
چنین رباتهای کوچکی را در آینده میتوان به صورت گروهی در محیطهای شلوغ مستقر کرد و برای کارهایی مانند ساخت کندو روی شاخه درخت مورد استفاده قرار داد. یک کاربرد دیگر، استفاده کردن از این رباتها برای حذف مواد خطرناک از مکانهایی است که رباتهای بزرگتر به راحتی نمیتوانند به آنها وارد شوند.
به رغم نشان دادن اولین پرواز هماهنگ رباتهایی در مقیاس حشرات، یک راه طولانی تا دستیابی به همکاری حشرات رباتیک در یک گروه وجود دارد. همکاری حشرات در طبیعت، یک کار خودجوش به نظر میرسد. آنها به واسطه برقراری ارتباط با همسایگان خود تصمیم میگیرند. با وجود فرمانده مرکزی، حشرات به طور جمعی میتوانند وظایف پیچیده شگفتانگیزی را مانند ساخت کندوها یا دفع شکارچیان انجام دهد. رفتارهای دستهجمعی حشرات به دهها، صدها یا حتی هزاران نفر نیز امکان میدهد تا با هم کار کنند.
پژوهشگران مشتاق هستند تا الگوریتمهای کار حشرات را بررسی کنند و آنها را در تعداد بیشتری از رباتها به کار بگیرند. در این فرآیند قطعا چالشهای جدیدی به وجود خواهند آمد. به عنوان مثال، هنگامی که تعداد بیشتری از رباتها در یک فضای کوچک به پرواز درآیند، اغلب در طول پرواز به یکدیگر برخورد میکنند. پژوهشگران، برخوردهای حین پرواز را نیز بررسی میکنند و به توسعه کنترلکنندههای پرواز میپردازند. آنها امیدوارند که روزی یک گروه کوچک از رباتها بتوانند گردهافشانی را انجام دهند.
رباتهای پرنده کوچک که با الهام از حشرات و پرندگان ساخته شدهاند، یک فناوری هیجانانگیز در ساخت پهپادها به شمار میروند. اگرچه این رباتها هنوز در مراحل اولیه توسعه هستند اما تاکنون نتایج امیدوارکنندهای را در تقلید از ظاهر و حرکات همتایان واقعی خود نشان دادهاند. با ادامه پیشرفت فناوری، دیدن اینکه چگونه این رباتها در آینده توسعه مییابند و مورد استفاده قرار میگیرند، جالب خواهد بود.
انتهای پیام
منبع : ایسنا



